 |
Collective construction
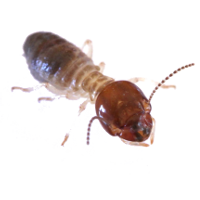
Termite colonies build tremendous, complicated mounds, acting with no central control or careful advance planning. These social insects provide a fantastic proof of principle that limited agents, acting independently with access only to local information, can build amazing things. How could we build and program robot swarms—artificial termite colonies—to build things for us? We want a human user to be able to give such a swarm a high-level description of what they want built, and have a guarantee that the system will build that thing, without the user having to be involved in the details of how it’s done.
Media coverage:
Our 2014 Science paper received a tremendous amount of attention, including coverage by
CNN,
NPR (All Things Considered),
the BBC,
the Boston Globe,
the Washington Post,
the LA Times,
The Economist,
the Wall Street Journal,
New Scientist,
National Geographic,
CNBC,
CBS News,
Scientific American,
Wired,
Popular Mechanics,
Science Friday,
and many others.
TERMES has also been featured on Fox’s Xploration Station, RoboNation TV, and exhibited at the London Science Museum and Museum of New Zealand (Te Papa Tongarewa).
Older coverage of our collective construction work includes
Discover Magazine (April 2013),
Communications of the ACM (March 2013),
Reuters TV (June 2012),
IEEE Spectrum (Automaton blog, June 2011),
Boston Globe (March 2010),
CNET News (July 2006),
Wired (July 2006).
Publications:
An autonomous vault-building robot system for creating spanning structures. Nathan Melenbrink, Ariel Wang, and Justin Werfel. IEEE International Conference on Robotics and Automation (ICRA), 2021.
Autonomous anchoring for robotic construction. Nathan Melenbrink, Katja Rinderspacher, Achim Menges, and Justin Werfel. Automation in Construction 120: 103391 (2020).
On-site autonomous construction robots: towards unsupervised building. Nathan Melenbrink, Justin Werfel, and Achim Menges. Automation in Construction 119: 103312 (2020).
Autonomous sheet pile driving robots for soil stabilization. Nathan Melenbrink and Justin Werfel. IEEE International Conference on Robotics and Automation (ICRA), 2019.
A swarm robot ecosystem for autonomous construction, 2017. Nathan Melenbrink and Justin Werfel. In Robotic Building: Architecture in the Age of Automation, Gilles Retsin, Manuel Jimenez, Mollie Claypool, and Vicente Soler, eds., München: DETAIL, pp. 88-90 (2019).
Local force cues for strength and stability in a distributed robotic construction system. Nathan Melenbrink and Justin Werfel. Swarm Intelligence 12(2): 129-153 (2018).
Toward automating construction with decentralized climbing robots and environmentally adaptive, functionally specified structures. Justin Werfel and Paul Kassabian. In Active Matter, Skylar Tibbits, ed., MIT Press, pp. 247-254 (2017).
Towards force-aware robot collectives for on-site construction. Nathan Melenbrink, Paul Kassabian, Achim Menges, and Justin Werfel. Association for Computer Aided Design in Architecture (ACADIA), pp. 382-391 (2017).
Using local force measurements to guide construction by distributed climbing robots. Nathan Melenbrink, Panagiotis Michalatos, Paul Kassabian, and Justin Werfel. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4333-4340 (2017).
TERMES: an autonomous robotic system for three-dimensional collective construction. Kirstin Petersen, Radhika Nagpal, and Justin Werfel. Robotics: Science and Systems VII, pp. 257-264 (2011).
Distributed multi-robot algorithms for the TERMES 3D collective construction system. Justin Werfel, Kirstin Petersen, and Radhika Nagpal. Workshop on Reconfigurable Modular Robotics, at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2011.
Collective construction with robot swarms. Justin Werfel. In Morphogenetic Engineering, Rene Doursat, Hiroki Sayama, and Olivier Michel, eds., Springer, pp. 115-140 (2012).
Three-dimensional construction with mobile robots and modular blocks. Justin Werfel and Radhika Nagpal. International Journal of Robotics Research 27 (3-4): 463-479 (2008).
Collective construction of environmentally-adaptive structures. Justin Werfel, Donald Ingber, and Radhika Nagpal. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2345-2352 (2007).
Towards a common comparison framework for global-to-local programming of self-assembling robotic systems. Justin Werfel and Radhika Nagpal. Workshop on Self-Reconfigurable Robots & Systems and Applications, at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2007.
Full version: Technical Report TR-14-07, Harvard EECS, 2007.
Robot search in 3D swarm construction. Justin Werfel. First IEEE International Conference on Self-Adaptive and Self-Organizing Systems (SASO), pp. 363-366 (2007).
Anthills built to order: Automating construction with artificial swarms. Justin Werfel. Doctoral thesis, MIT, May 2006.
Extended stigmergy in collective construction. Justin Werfel and Radhika Nagpal. IEEE Intelligent Systems 21(2): 20-28 (2006).
Distributed construction by mobile robots with enhanced building blocks. Justin Werfel, Yaneer Bar-Yam, Daniela Rus, and Radhika Nagpal. IEEE International Conference on Robotics and Automation (ICRA), pp. 2787-2794 (2006).
Three-dimensional directed construction. Justin Werfel and Radhika Nagpal. Workshop on Self-Reconfigurable Modular Robots, at Robotics: Science and Systems II, 2006.
Collective construction using LEGO robots. Crystal Schuil, Matthew Valente, Justin Werfel, and Radhika Nagpal. Robot Exhibition, Twenty-First National Conference on Artificial Intelligence (AAAI), 2006. [Received Technical Innovation Award for "elegant connection of theory and design".]
Building patterned structures with robot swarms. Justin Werfel, Yaneer Bar-Yam, and Radhika Nagpal. Nineteenth International Joint Conference on Artificial Intelligence (IJCAI), pp.1495-1502 (2005).
Construction by robot swarms using extended stigmergy. Justin Werfel, Yaneer Bar-Yam, and Radhika Nagpal. AI Memo AIM-2005-011, MIT Computer Science and Artificial Intelligence Laboratory (CSAIL), 2005.
Building blocks for multi-agent construction. Justin Werfel. Distributed Autonomous Robotic Systems 6 (DARS), 2004.
|















{kind=link}
{kind=link}